Ergo-Lean aims to study human ergonomics during complex human-robot-environment interactions, and investigate methods to anticipate the effect of worker actions in the short, middle and long term. It explores the potential of collaborative robotics technology to deliver an original set of anticipatory behaviours that contribute to the improvement of human physical factors during interaction.
Ergo-Lean
Rethinking Human Ergonomics in Lean Manufacturing and Service Industry
Towards Adaptive Robots with Anticipatory Behaviours
Monitoring
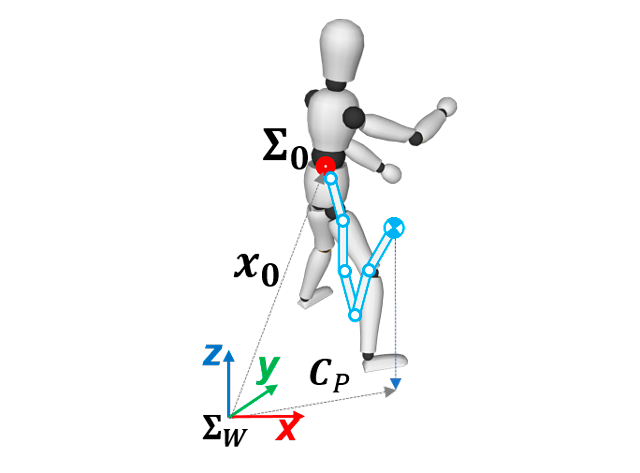
Understanding and formulate human ergonomics and delivered effort in highly dynamic human-environment interactions.
Feedback
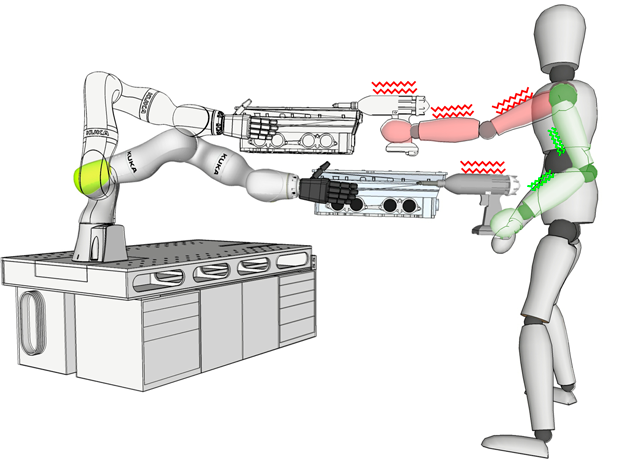
Study the influence of Ergo-Assistant Interfaces on ergonomic coordination of motor redundancy.
Ergonomic HRC
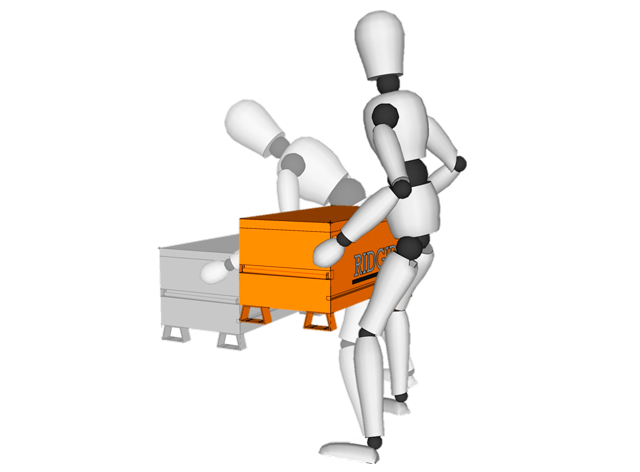
Investigate ways of applying the Human-Robot Collaboration technology to the mitigation of physical occupational risks.